|
|
|
|
|
|
|
University Projects |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ANIMATRONIC SYSTEM
The animatronic possesses five grades of freedom that execute the basic movements of the face by means of servomotors, gesticulates voice recordings reproducing a compact disc with 80 minutes of audio capacity, react to external stimulus using movement sensors and possesses a serial interface to communicate with PC for its programming.
The animatronic is at present in “El Museo National de Transporte” Cali, Colombia (The National Transport Museum) reciting an introduction to visitors of the railroad miniature.
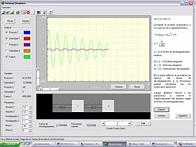
HAPTIC SYSTEM
In 2004 I developed an haptic system as a dynamic systems project area This virtual laboratory allows students to model and analyze dynamic systems setting the wished parameters of mass, springs and damper coefficients, in addition to experiencing the physical phenomena as: stickiness, damping, rigidity and inertia. Using sense of tact, theoretical concepts are connected with the physical reality in a virtual ambience.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
![]()
| Cali, Colombia 2006 | www.mecatronica.iwarp.com | oscar.gomez@unionplastica.com |